roscore
rosrunt basics topic_publisher.py
rosrunt basics topic_subscriber.py 에 더하여

rosrun turtlesim turtlesim_node
를 실행 하였을때의 rqt_graph
==> turtle1/cms_vel 에서 turtlesim으로 토픽을 준다
tutlesim이 color_sensor와 pose라는 곳으로 토픽을 보낸다

rostopic info /turtle1/cmd_vel
받는것은 없고(publisher가 없고)
tutlesim에게 보내주고 있음.
이에, puplishers를 추가해줄 수 있음.


rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
로 토픽을 한번 보내어 움직이게 할 수 있다.(angular는 라디안 값)
=> 거북이가 x축 +1 만큼 움직인 모습
pub 이 어떤 명령어들 가지고 있는가? => rostopic pub -h
-r을 이용하여 일정시간마다 토픽을 보낼 수 있다.
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0" -r 10
10은 10hz 즉, 0.1 초마다 보낸다는 뜻

갈수 없는 지역(벽)을 만나면 경고를 보이는 모습
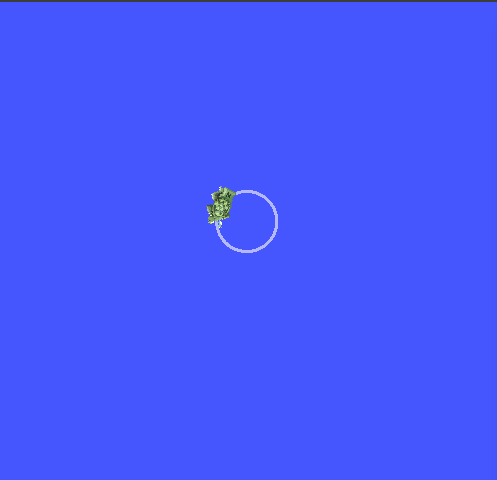
linear과 angular를 적당히 조정하면 일정하게 돌아가는 것을 볼수 있다.
현재 tutle1이 받는 토픽을 수치로 보려면
rostopic echo /turtle1/cmd_vel 입력