
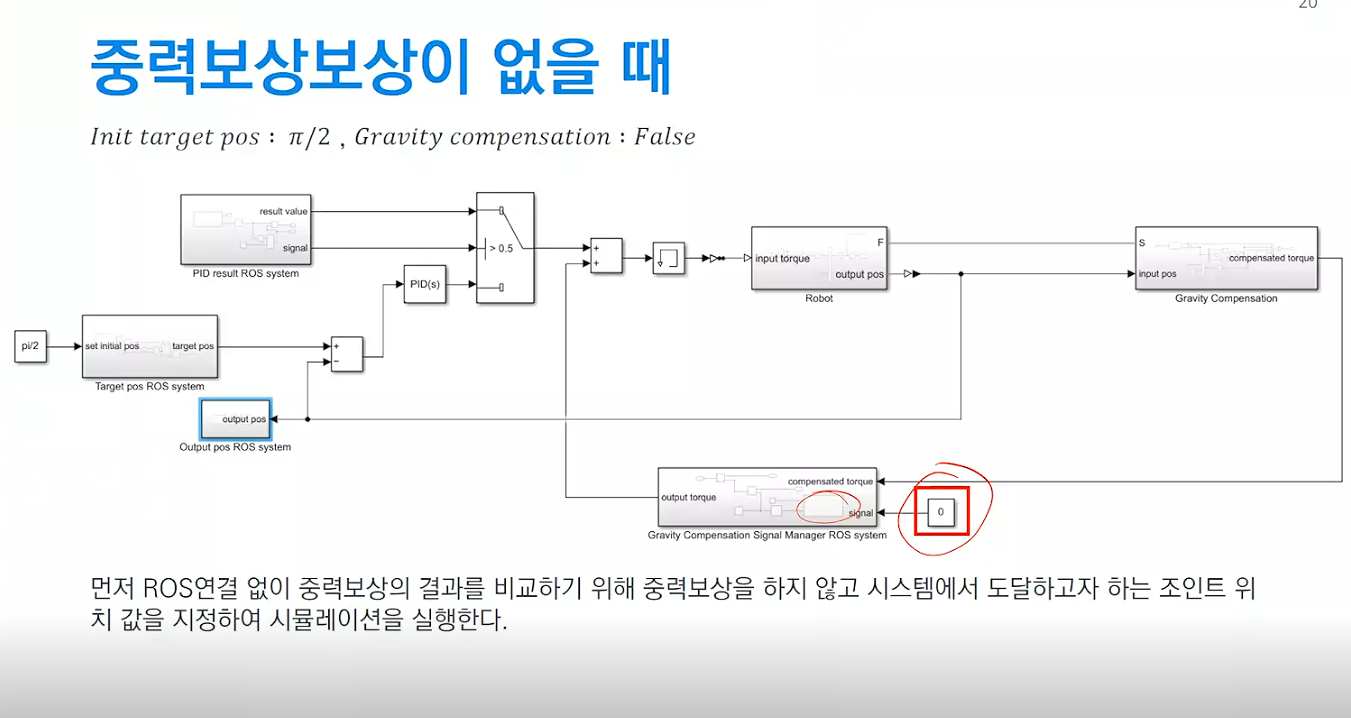
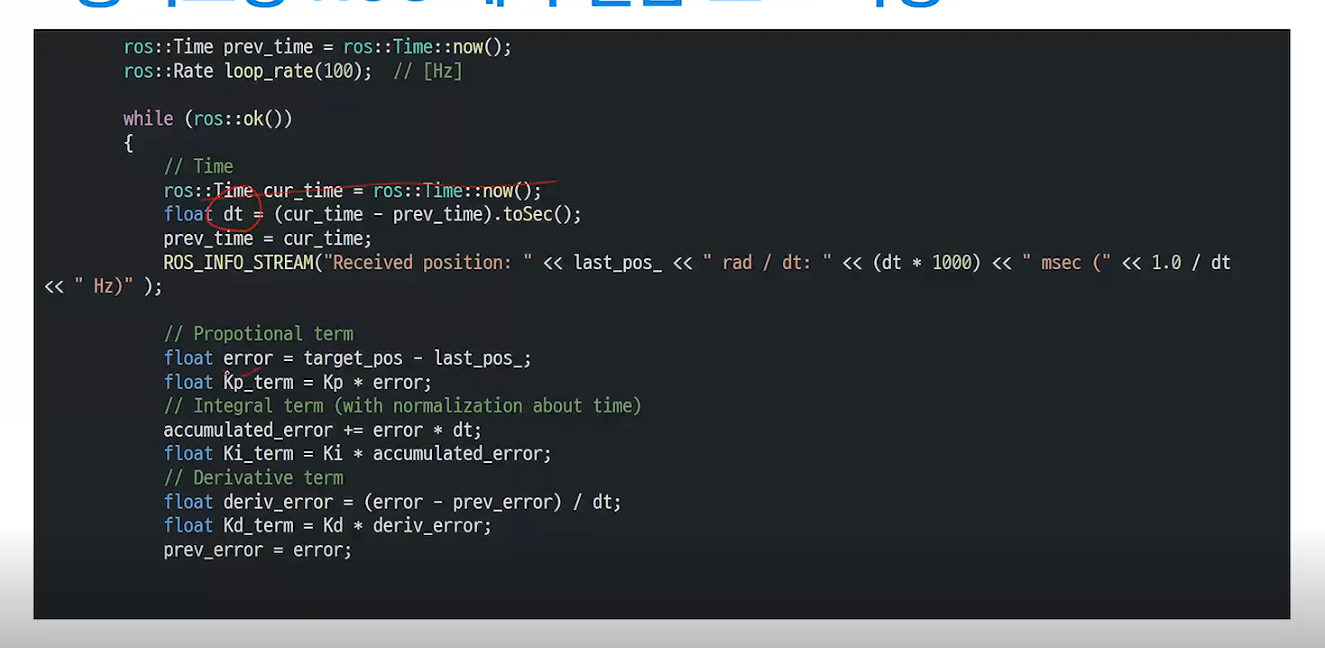
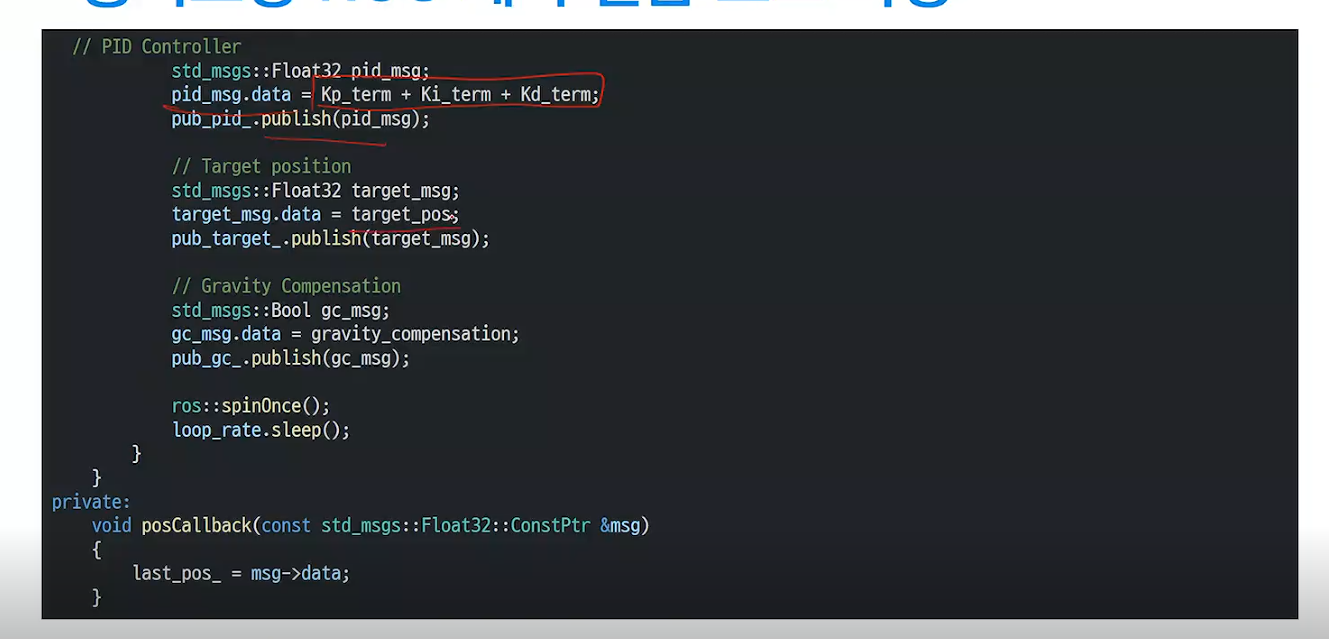
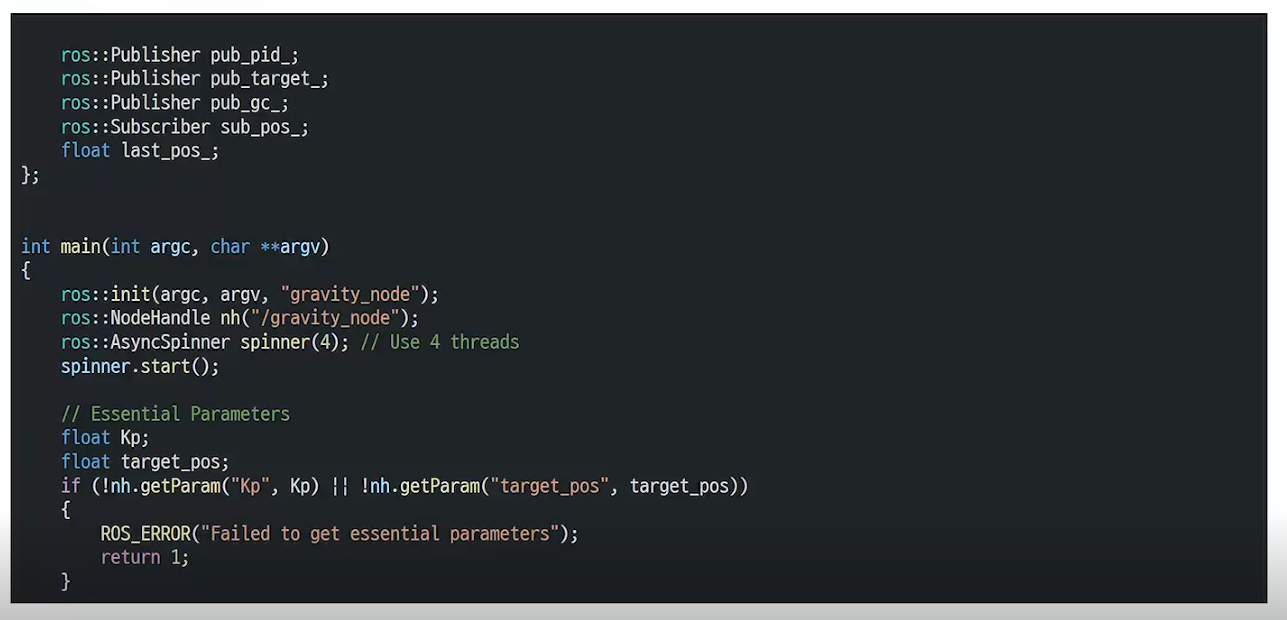
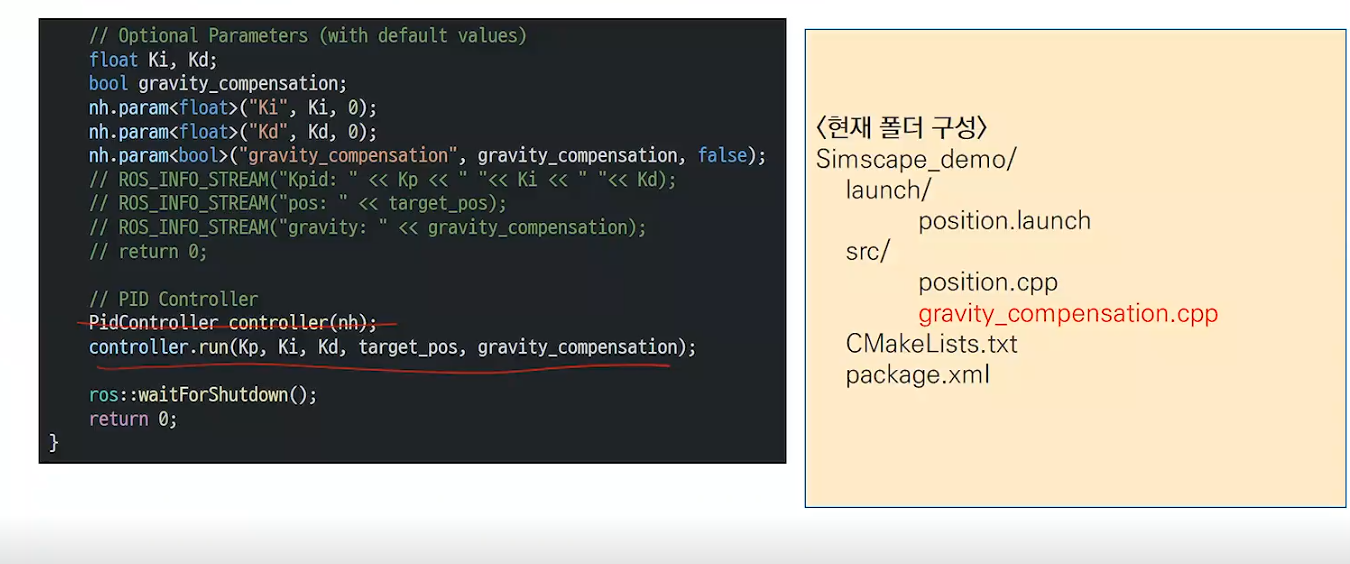
ros pid , target + robot + gravity








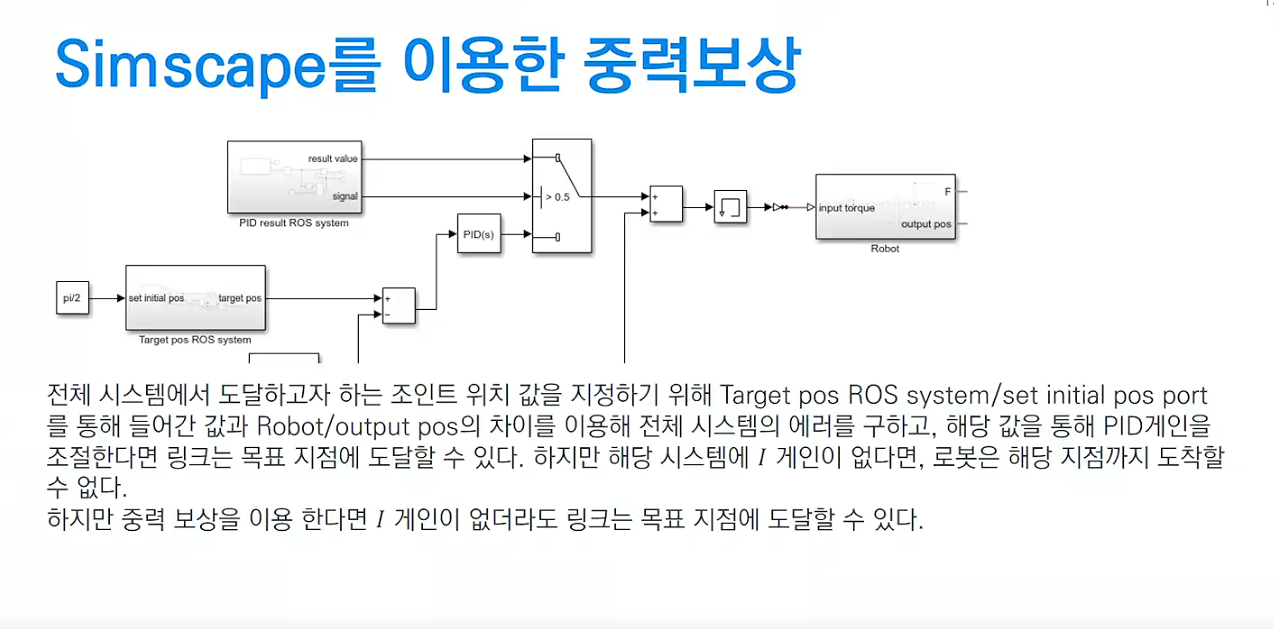

matlab 이용하는 이유? : 비선형적인 로봇의 behavior을 수학적으로 모델링하는 것이 굉장히 쉽기 때문이다.
'대외교육 > H-mobility Robotics' 카테고리의 다른 글
| omniwheel (0) | 2023.09.30 |
|---|---|
| [H-mobility class][1DOFcontroll-matlab] 4. 마찰보상 (1) | 2023.09.30 |
| [H-mobility class][1DOFcontroll-matlab] 2.simulink - ROS (0) | 2023.09.27 |
| [H-mobility class][1DOFcontroll-matlab] 1.SIMSCAPE (0) | 2023.09.27 |
| [H-mobility Robotics][Sensor]IMU 센서 (0) | 2023.09.21 |