출처 : http://www.kmooc.kr/courses/course-v1:SEOULTECHk+SMOOC03k+2021_T01/video
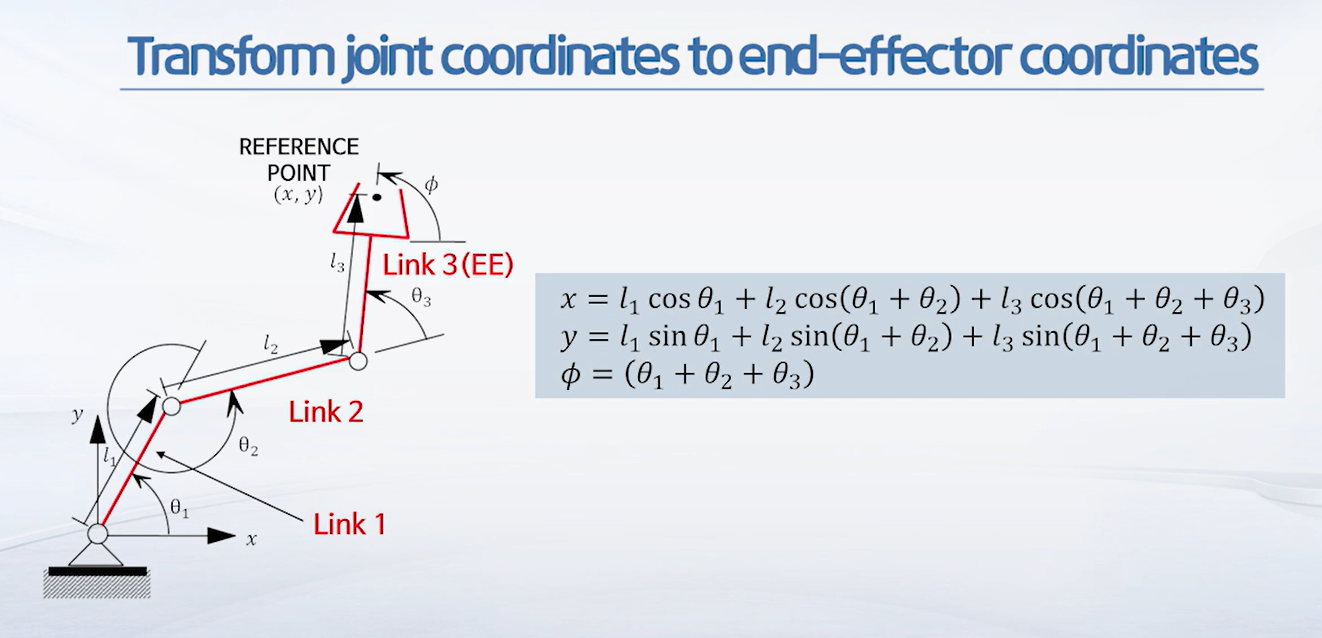
Forward Kinematics(정기구학) : ‘마지막 끝점(end-effector)의 위치를 어떻게 찾아낼 수 있느냐에 대한 것
( θ(세타)가 주어졌을 때, 엑스(X)를 찾는 문제 )
Inverse linematics(역기구학) : 위치 점들에 가기 위해서 각각의 관절들의 각도들을 어떻게 꺾어 줘야지만 이 위치로 갈 수 있는지에 대한 것.
( 엑스(X)가 주어졌을 때, θ(세타)를 찾는 문제 )

기구학은 위와 같이 위치기반, 속도기반으로 나타낼 수도 있다.
위치기반 : homogeneous transformation
속도기반 : Jacobian
Degree of Freedom (DoF, 자유도) : 엑스(x), 와이(y), 지(z) 위치, 그리고 롤, 피치, 요와 같은 각도, 이런 정보들의 집합
EX) 비행기는 6자유도, 자동차는 3자유도, 로봇팔은 7자유도(3개 1개 3개)
'대외교육 > H-mobility Robotics' 카테고리의 다른 글
| [H-mobility Robotics][Sensor]Encorder(엔코더) (0) | 2023.09.15 |
|---|---|
| [H-mobility Robotics] [Forward Kinematics(정기구학)] 로봇기구학 실습1 (Eigen 라이브러리 사용) (1) | 2023.09.06 |
| [H-mobility Robotics] [ROS] Publisher and Subscriber (0) | 2023.09.04 |
| [H-mobility Robotics][ROS]CMake (0) | 2023.08.18 |
| [H-mobility Robotics][ROS]WSL을 이용한 Ubuntu 18.04설치와 ROS Melodic 설치 (0) | 2023.08.17 |